Dossier d'électronique
Nous marchons quotidiennement sans nous poser de questions sur la prouesse réalisée. Et pourtant, regardons les mois d’apprentissage nécessaires à un jeune enfant pour qu’il maîtrise ce processus finalement si complexe.
Un robot marcheur a toujours un côté un peu magique. L'homme le perçoit comme plus vivant, plus autonome du fait qu'il marche. Seulement voilà réaliser un robot marcheur est beaucoup moins aisé à construire qu'un robot rouleur.
Je vous propose de nous arrêter sur les problèmatiques de la marche, et de réfléchir à quelques solutions. Nous nous intéresserons essentiellement à la marche quasi-statique , nettement plus simple à implémenter que la marche dynamique.
Outre le fait de copier l'animal, la marche permet d'utiliser une plus grande variété de terrains. Le sol peut-être irrégulier voir parsemé de petits obstacles. Une approche consiste à penser que le robot doit être le plus proche de l'homme afin de pouvoir l’utiliser là ou va l'homme. De nombreux laboratoires travaillent déjà sur ce sujet.
Troody |
Quadruped |
Aujourd'hui, la marche est loin d'être maîtrisée. Malgré leurs capacités à danser, descendre ou monter les marches et même taper dans une balle, les bipèdes manquent d'aisance et d'autonomie; tout comme les robots quadrupèdes qui apparaissent encore hésitants.
L'équilibre est déterminée par le centre de gravité. Pour rappel, le centre de gravité est le point d’application de la résultante des actions de la pesanteur sur toutes les parties d’un corps. Celui-ci doit se trouver au dessus de la surface délimitée par les points d’appuis sinon le robot (l’animal, la construction) est en déséquilibre. En d'autres termes, la projection orthogonale du centre de gravité doit être à l'intérieur de la surface délimitée par les points d'appuis.
Nous pouvons d'ore et déjà noter qu'un corps gardera plus facilement son équilibre si
Lorsqu'un animal marche, il se trouve en déséquilibre entre chaque pas. Il récupère son équilibre au moment où il repose ses pattes situées en l'air, puis se place de nouveau en déséquilibre en soulevant d'autres pattes. Ceci explique pourquoi il est difficile de s'arrêter en pleine marche. C’est ce que l’on appelle une marche dynamique.
A l'opposé, la marche quasi-statique se caractèrise par le fait que le robot n'est jamais en déséquilibre. La projection du centre de gravité sera donc à l'intérieur de la surface délimitée par les points d'appuis. Cette zone s'appelle le polygone de sustentation. Voyons ensembles quelques cas de robots utilisant la marche quasi-statique.
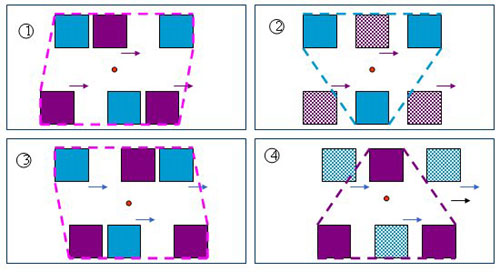
Pour un robot hexapode, la marche la plus courante est le tripode alterné. Il va se déplacer en soulevant 3 pattes à la fois, c’est à dire les deux extrêmes d'un côté et la patte centrale du côté opposé. Puis il recommence en alternant les 3 pattes, et ainsi de suite....
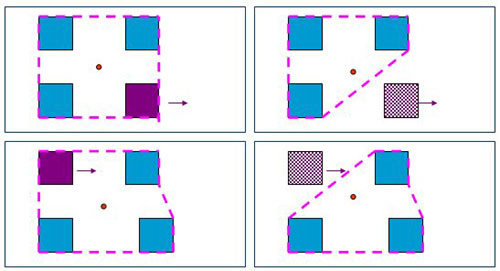
Sur les figures, les couleurs pleines représentent les pattes au sol et les couleurs hachurées symbolisent les pattes en l'air. Les points d'appuis qui sont donc en couleur pleine déterminent la surface (en pointillé) sur laquelle le centre de gravité (représenté par un petit cercle rouge) doit se trouver.
Ces robots sont assez faciles à réaliser (avec un Mindstorms par exemple). Par contre, la difficulté réside dans la possibilité de les faire tourner. Ce robot peut être construit avec un seul moteur.
Il semble évident que moins le robot a de pattes, plus il est difficile de le faire marcher. Dans le cas d'un quadrupède, la solution la plus simple va être de déplacer les pattes une par une comme le montrent les figures suivantes. L'équilibre est facilement maintenu grâce à la projection du centre de gravité toujours très bien placée par rapport au polygone de sustentation.
Le problème majeur de cette solution réside dans sa lenteur. En effet, le robot doit faire 4 déplacements pour avancer d'un pas !
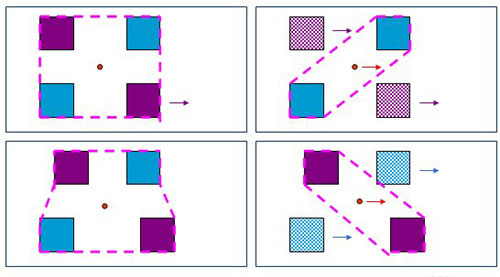
Pour augmenter la vitesse du déplacement, il peut être envisagé de déplacer les deux pattes opposées en même temps. Nous voyons alors que le polygone de sustentation devient étroit et est directement déterminé par la largeur des pattes. De plus en voulant simplifier le problème, le déplacement des pattes fait bouger la position du centre de gravité. Pas simple ! ! !
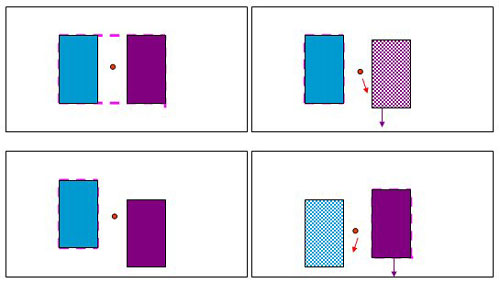
Le rêve du roboticien est évidemment de voir un robot marcher sur 2 pattes.
Seulement comment faire sans l’utilisation de puissants ordinateurs pour calculer et rétablir la trajectoire comme le font des projets tels que BIP (inria) ou asimo (Honda) ?
La première idée consiste à utiliser des pieds assez grands et encadrant la zone centrale (où se trouve la projection du centre de gravité). Nous avons utilisé dans le schéma des pieds en U mais d'autres formes sont possibles.
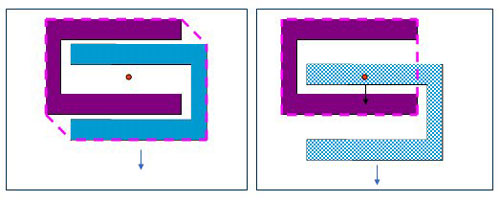
Dans ce cas aussi, les changements de direction sont difficiles à mettre en place.
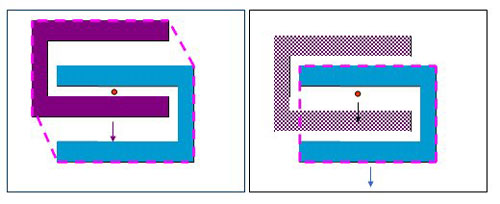
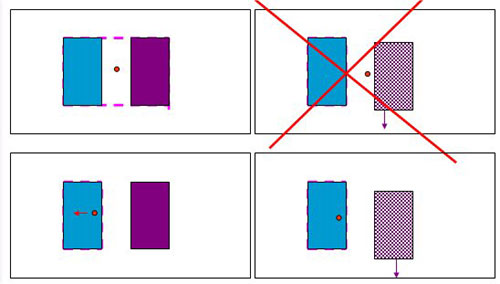
Une deuxième solution consiste à amener la projection du centre de gravité au polygone de sustentation. Il faut déplacer avant chaque mouvement une partie de la masse du robot au dessus du pied restant en appui en basculant une partie du robot (les piles par exemple) à chaque déplacement.
Finalement la marche statique peut être implantée relativement facilement sur un robot en prenant par exemple la base d'un robot Mindstorms ou en le construisant à partir de Mecano.
Par contre, les étapes suivantes s'avèrent délicates. Le nombre de moteurs et la complexité du montage augmentent si l'on veut ajouter un changement de direction. C'est cependant une étape indispensable pour interagir avec l'environnement (suivre la lumière, éviter un obstacle, ...).
A vos boites et fer à soudure !




")















lelectronique.com, tout le nécessaire pour apprendre, comprendre, et dépanner vos montages électroniques pour les débutants et les confirmés.
Suivez-nous


